Design and Evaluation of a Needle Manipulation System with EM Tracking for CT-Guided Spinal Injections
May 4, 2025·
 ,
,
,
,
,
,
·
1 min read
,
,
,
,
,
,
·
1 min read
Chang Chang
Junling Mei
Yanzhou Wang
Lidia Al-Zogbi
Simon Leonard
Amit Jain
Iulian Iordachita
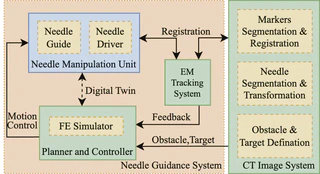 Image credit: Unsplash
Image credit: Unsplash
Abstract
This paper presents a flexible needle guidance system and its workflow that enables registration of computed tomography (CT) and electromagnetic (EM) tracking systems with a finite element (FE) simulator for needle-based percutaneous spinal injections. CT is used only pre- and postoperatively for surgical planning and confirmation, while EM tracking is combined intraoperatively with an FE-based needle controller to track the planned needle trajectory and avoid obstacles. Evaluation of the proposed system using a multi-layer soft tissue phantom shows an average targeting accuracy of 0.4 mm.
Type
Publication
In IEEE International Symposium on Medical Robotics (ISMR 2025)
Note
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.