Design and Evaluation of a Needle Manipulation System with EM Tracking for CT-Guided Spinal Injections
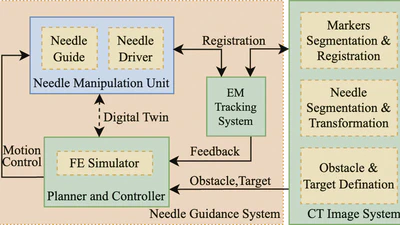
We propose a CT-registered, EM-tracked, FE-based flexible needle manipulation system achieving 0.4 mm targeting accuracy for spinal injections.
We propose a CT-registered, EM-tracked, FE-based flexible needle manipulation system achieving 0.4 mm targeting accuracy for spinal injections.